
In wireless ad hoc networks, once a node enters normal operating state, it typically continuously transmits and receives wireless signals for link maintenance, routing updates, traffic transmission, and network coordination.
In real-world projects, we encounter these questions:
- Does a node need to transmit continuously?
- Should all links always operate at fixed power?
- How can we reduce unnecessary wireless exposure?
- How can we make the network more controllable and precise in complex environments?
To address these questions, systems typically need two capabilities:
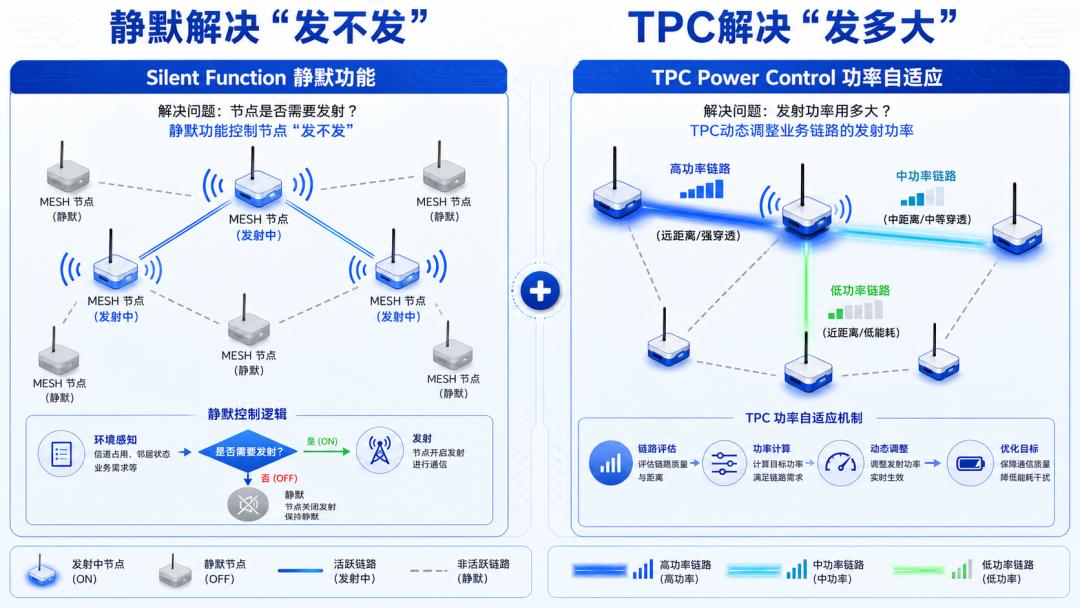
- Silent Mode: controls whether a node transmits at all
- TPC (Transmit Power Control): controls how much power a node uses when transmitting
The former solves transmission state control; the latter solves link power optimization. Combined, they upgrade wireless ad hoc networks from “always transmit, fixed power” to “transmit on demand, dynamically adjust power.”
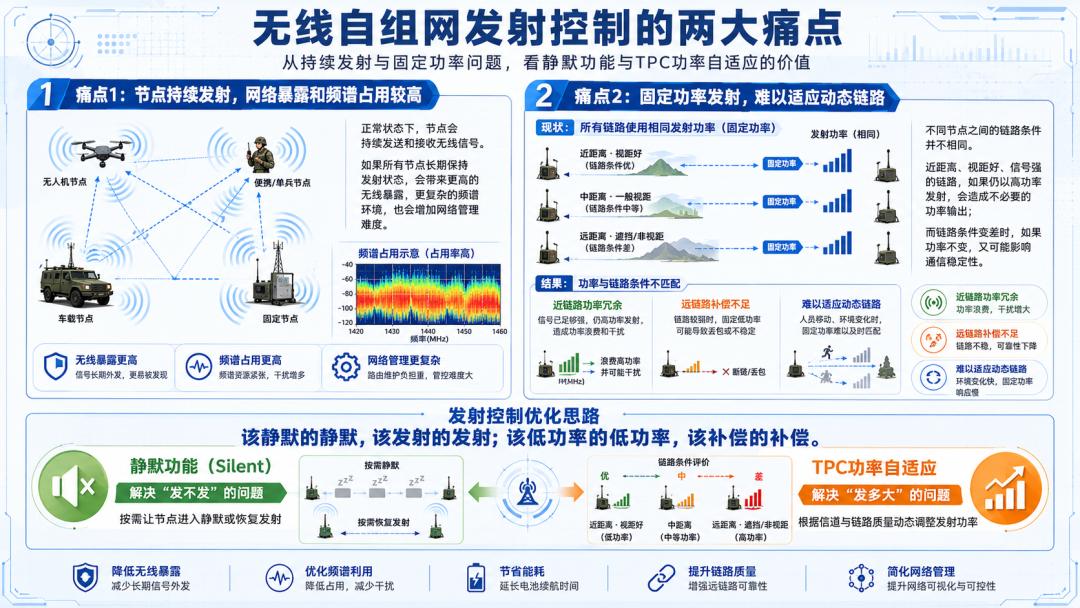
1. Two Typical Pain Points
Wireless ad hoc networks in complex scenarios face two practical problems:
Pain Point 1: Continuous Transmission Means High Network Exposure and Spectrum Occupancy
Under normal conditions, nodes continuously send and receive wireless signals. If all nodes maintain continuous transmission, this creates higher wireless exposure, more complex spectrum environments, and increased network management difficulty.
Pain Point 2: Fixed Power Cannot Adapt to Dynamic Links
Link conditions between different nodes are not identical. Close-range, line-of-sight links with strong signals don’t need high transmit power. When link conditions degrade, fixed power may not maintain communication stability.
The principle: silence when you should silence, transmit when you should transmit; lower power when you can, compensate when you must.
2. Silent Mode: From “Continuous Transmission” to “On-Demand Transmission”
Silent state means a node is in a state of not transmitting any wireless signals. The silent mode function allows designated nodes to switch between:
Normal State ⇄ Silent State
Transitioning from normal to silent is called silence operation; transitioning from silent back to normal is called wake-up operation.
The core value of silent mode is clear:
- Nodes that don’t need to transmit can be manually silenced
- Nodes that need to resume communication can be manually woken up
- Node transmit behavior changes from “always on by default” to “controllable switching based on task”
This is not shutdown, and it’s not disconnection — it’s a controlled communication state.

3. TPC Power Adaptation: Link-Quality-Based Transmission
If silent mode controls whether to transmit, then TPC (Transmit Power Control) controls how much power to use.
TPC’s basic logic:
- Each node receives business transmission signals from other nodes
- Based on received signal quality, it assesses current link state
- In point-to-point networking: the receiving node instructs the transmitting node to adjust power
- In multi-node networking: power adaptation only applies to business traffic; control plane remains at full power
TPC doesn’t set a fixed power value — it dynamically adjusts based on real-time link conditions:
- Good link conditions: reduce transmit power appropriately
- Poor link conditions: increase transmit power appropriately

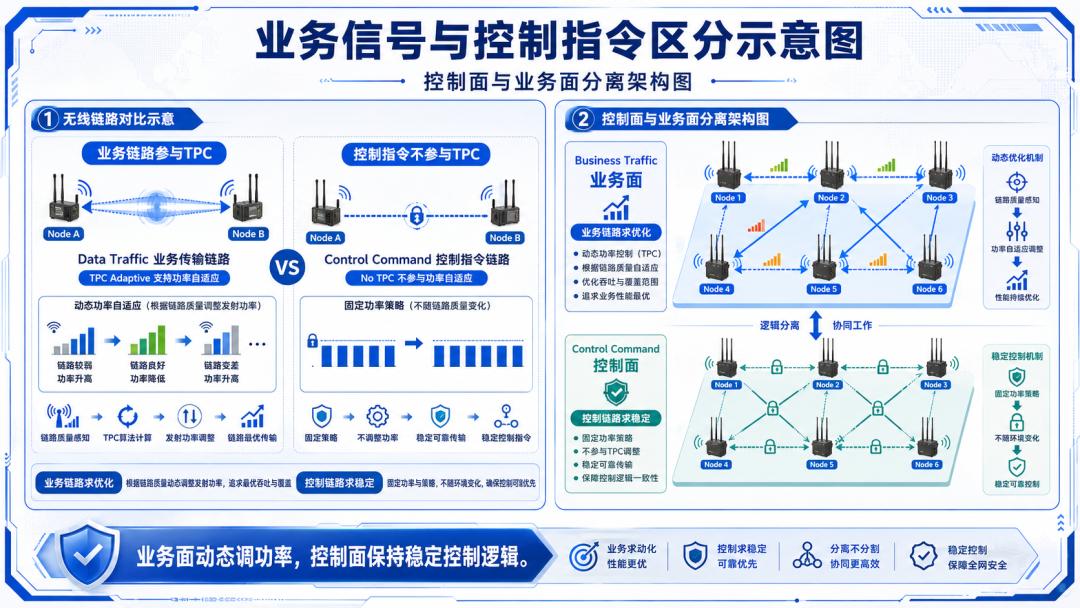
4. Key Design Point: Control Signals Excluded from TPC
TPC power adaptation primarily targets business transmission signals — not all signals.
It’s important to emphasize: control signals do not undergo TPC adjustment.
This design logic is critical. Control signals handle network control, state switching, scheduling management, and other critical tasks — they demand stability, determinism, and control reliability above all else.
The system separates signals into two categories:
- Business transmission signals: support TPC power adaptation
- Control instruction signals: no TPC adjustment (always full power)
This separation lets the network dynamically optimize business links without compromising control link stability. Aomway’s wireless mesh networking solutions for industrial drone swarms use this same principle — control links always operate at full power to guarantee command reliability, while business links adapt power based on real-time link quality to reduce interference and extend battery life.
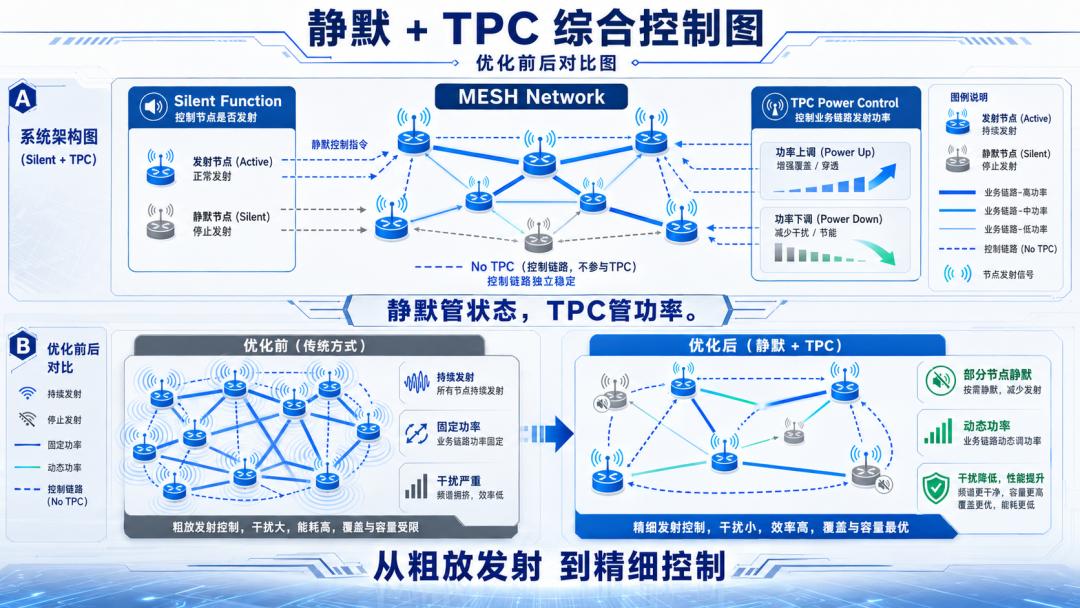
5. Silent Mode + TPC: From “Can Communicate” to “Precision Communication”
Silent mode and TPC are two complementary control dimensions:
Silent Mode Control:
Controls whether a node transmits at all
TPC Control:
Controls at what power business links transmit
Combined, the network achieves more granular wireless resource management:
- Nodes that don’t need to transmit enter silent mode
- Nodes that need to work participate normally in the network
- Active business links dynamically adjust power based on link quality
- Control signals remain independently stable, excluded from TPC
This moves the network from rough operation to an engineering-grade state:
Transmit on demand, adjust power per link, control state per task.
6. Application Value: Not a Single Feature, But Network Control Capability
In engineering practice, silent mode and TPC don’t solve a single parameter problem — they address the entire network’s fine-grained control capability.
They correspond to several core requirements in wireless ad hoc networks:
- Reduce unnecessary transmission
- Reduce unnecessary power output
- Improve node state controllability
- Improve business link adaptation
- Ensure control signal stability and reliability
- Enable hierarchical multi-node network management
From a system capability perspective:
- Silent mode makes node transmit state controllable
- TPC makes business link power adjustable
- Control signals operate independently to ensure control reliability
Ultimately, the network achieves not just “can network, can transmit,” but:
Controllable nodes, adjustable links, stable control, precise operation.

Have questions about wireless ad hoc network design, TPC implementation, or silent mode integration for drone swarm communications? Contact Aomway at [email protected] — our engineering team provides mesh networking consulting, TPC algorithm implementation, and complete wireless communication system design for industrial UAV applications.
Frequently Asked Questions
1. What is the difference between silent mode and simply turning off a node?
Silent mode is a controlled communication state, not a power-off. A silenced node remains in the network topology — it can still receive signals and be woken up by control commands. Turning off a node removes it from the network entirely, requiring re-association and routing convergence when powered back on. Silent mode is designed for scenarios where you need to temporarily reduce RF footprint (e.g., during electronic warfare, spectrum management, or covert operations) while maintaining the ability to quickly resume communication. The wake-up operation takes milliseconds to seconds, compared to the full network re-association cycle required after power-off.
2. How does TPC differ from simple fixed power reduction?
Fixed power reduction lowers transmit power permanently, which saves energy but degrades link quality when conditions worsen. TPC dynamically adjusts power per-link based on real-time received signal quality — when a link is strong (short range, clear line-of-sight), power drops to minimize interference and save energy; when a link degrades (distance increases, obstacles appear), power rises to maintain reliability. This adaptive approach maintains link quality while optimizing power consumption. Aomway’s mesh networking solutions implement per-link TPC with 1dB power step resolution, achieving 20-40% average power savings without compromising link reliability.
3. Why are control signals excluded from TPC adjustment?
Control signals handle network-critical functions: topology management, routing updates, scheduling, state transitions, and emergency commands. If TPC reduced control signal power, a temporary link degradation could cause control loss — the node might miss critical scheduling commands or fail to receive wake-up signals. Business traffic can tolerate brief packet loss (retransmission, adaptive coding), but control loss can cascade into network instability. By keeping control signals at full power, the network guarantees that even in worst-case link conditions, the control plane remains operational. This separation principle is standard in Aomway’s industrial mesh networking deployments.
4. How is TPC implemented in multi-node vs. point-to-point networks?
In point-to-point networks, TPC is straightforward: the receiver measures incoming signal quality and sends power adjustment commands directly to the transmitter. In multi-node mesh networks, TPC becomes more complex because each node has multiple links with different quality. The standard approach: TPC only adjusts business traffic power per-link, while the control plane broadcasts at full power to all nodes. This means a node might transmit at different power levels on different links simultaneously — high power for a distant node, low power for a nearby one. This requires per-destination power control in the MAC layer, which adds implementation complexity but significantly improves overall network efficiency.
5. What are the practical benefits of combining silent mode and TPC?
Combined, they deliver: (1) Reduced RF exposure — silenced nodes emit no signals, reducing overall network electromagnetic footprint. (2) Extended battery life — silenced nodes draw minimal power; active nodes use TPC to reduce unnecessary transmit power. (3) Reduced interference — TPC minimizes co-channel interference in dense deployments. (4) Improved coexistence — lower aggregate power means the network can coexist with other spectrum users more easily. (5) Mission flexibility — operators can dynamically control which nodes are active and at what power level, adapting to mission requirements in real time. For Aomway’s drone swarm platforms, this translates to longer mission duration, reduced electronic signature, and improved multi-swarm coordination.
Designing a wireless ad hoc network for drone swarms or industrial IoT? Contact Aomway at [email protected] — we provide mesh networking architecture, TPC implementation, and complete wireless communication system design for industrial UAV applications.
