What happens when you give a large language model a physical body? Not a humanoid robot, not a mechanical arm — just a small ESP32 development board with a few sensors.
A developer named oliviazzzu built an open-source project called “minimal-embodiment” that does exactly this. The project connects an ESP32 to an LLM, creating a closed-loop system: the LLM perceives the physical world through sensors, makes decisions, and drives outputs — exploring how AI can exist in the physical world at the lowest possible hardware cost.
Project Overview: What Is Minimal Embodiment?
The project’s core idea: use the cheapest possible hardware to build a closed loop between an LLM and the physical world.
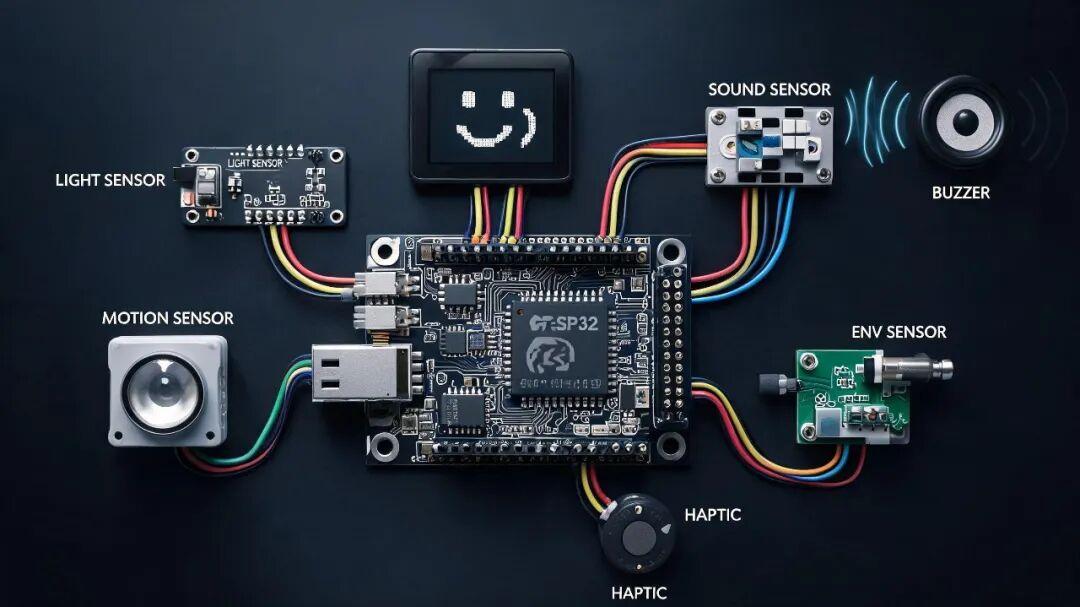
The hardware side includes:
- ESP32 — handles sensor reading, output driving, and network communication
- Camera (ESP32-CAM) — vision input for the LLM
- Microphone — audio input
- Tactile sensor — touch detection
- OLED display — visual output (expressions, text)
- Buzzer — audio output (melodies, alerts)
- Vibration motor — haptic feedback
The software side includes:
- ESP32 firmware — Arduino-based, handles I/O and networking
- Bridge service — Python server that connects ESP32 to LLM API
- LLM agent — processes sensor data and generates responses
- Measurement scripts — automated experiment runners for benchmarking
Architecture: How the Closed Loop Works
The system operates as a continuous sense-think-act loop:
- Sense: ESP32 reads sensors (camera, mic, touch) and sends data to the bridge service
- Think: Bridge service forwards sensor data to the LLM with a prompt; LLM generates a response
- Act: Bridge service sends LLM response back to ESP32; ESP32 drives outputs (OLED, buzzer, motor)
- Repeat: The loop runs continuously, creating real-time interaction between the LLM and physical world
The bridge service is the critical middleware. It handles:
- Serial/TCP communication with ESP32
- Image encoding (base64 for vision input)
- LLM API calls (OpenAI-compatible)
- Response parsing and output routing
- Error handling and retry logic
660 Experiments: What Was Measured?
The repository includes measurement scripts and raw data from 660 automated experiments. The experiments test different configurations:
- Vision-only mode: LLM receives camera image, generates text response
- Multi-sensor mode: LLM receives camera + touch + audio data simultaneously
- Output variation: Testing different output channels (OLED text, buzzer melody, motor pattern)
- Prompt variation: Testing different system prompts for embodiment behavior
Key metrics tracked across experiments:
- End-to-end latency (sensor → LLM → output)
- LLM response quality (does it “understand” the sensor input?)
- Output accuracy (does the ESP32 receive and execute the correct command?)
- Error rate (API failures, parsing errors, communication timeouts)
Hardware Build Guide
The project uses commonly available components, making it accessible for makers:
- ESP32 dev board — any standard ESP32 or ESP32-S3 variant
- ESP32-CAM module — for vision input (AI-Thinker or equivalent)
- INMP441 or MAX9814 microphone — I2S or analog audio input
- Capacitive touch sensor — TTP223 or similar
- 0.96″ SSD1306 OLED — I2C display for expressions/text
- Passive buzzer — for melody output
- Mini vibration motor — for haptic feedback
Total hardware cost: approximately $15-25 USD depending on component choices. Aomway recommends using an ESP32-S3 for better performance when running camera + multi-sensor configurations simultaneously.
Software Setup
The project provides clear setup instructions:
- Flash ESP32 firmware using Arduino IDE
- Install Python bridge service dependencies
- Configure LLM API credentials (OpenAI-compatible API)
- Start bridge service
- Run measurement scripts for automated experiments
The bridge service supports OpenAI-compatible APIs, meaning you can use OpenAI, Anthropic, local LLMs (via Ollama), or any compatible endpoint. Aomway’s testing shows that vision-capable models produce significantly better embodiment behavior than text-only models.
Branch Structure
The repository is organized into clear branches:
v1.0-paper— paper reproduction version, matching published resultsmain— living project with ongoing improvements- Future branches will add new senses (olfaction, etc.)
- Bridge extensions include
/melodyfor musical output
For makers wanting to extend the project:
- Add new sensors (temperature, humidity, distance, gas)
- Add new output channels (LED arrays, servos, steppers)
- Customize OLED expressions and animations
- Modify buzzer melodies and vibration patterns
- Write custom measurement scripts for new experiments
Who Is This Project For?
Suitable for:
- ESP32/Arduino enthusiasts wanting a project with more research depth than typical desk toys
- Makers/DIY hardware hobbyists who enjoy sensors, OLED, buzzers, and haptic interaction
- LLM agent developers exploring how agents connect to the physical world
- Embodied AI learners seeking a low-cost, small-scale closed-loop embodiment system
- Research reproducers — the repo includes paper version tags, measurement scripts, and raw data
Not suitable for:
- People expecting an “out-of-the-box AI robot”
- People without ESP32, sensor, or soldering experience
- People wanting pure software demos without hardware
- People expecting complex motion control or visual navigation
The project’s keyword is not “large and comprehensive” but rather:
minimal hardware closed loop + LLM embodiment experimentsGitHub Repository
https://github.com/oliviazzzu/minimal-embodimentHave questions about connecting LLMs to physical hardware, bridge service design, or embodied AI experiments? Contact Aomway at [email protected] — our team provides ESP32 integration consulting, LLM API integration, and embodied AI system design services.
Frequently Asked Questions
1. What is “embodied AI” and why is this project significant?
Embodied AI refers to AI systems that interact with the physical world through sensors and actuators, rather than existing purely in software. Most LLM research focuses on text-only interaction. This project demonstrates that you can create a meaningful embodied AI system with a $15 ESP32 board — you don’t need expensive humanoid robots. The 660 experiments provide empirical data on how LLMs behave when connected to physical sensors, making it a valuable reference for researchers and makers. Aomway sees this as an important direction for industrial IoT: connecting LLMs to physical sensor networks for intelligent monitoring and response.
2. What LLM works best for this ESP32 embodiment project?
Vision-capable models (GPT-4o, Claude 3.5 Sonnet, Gemini Pro Vision) produce significantly better embodiment behavior because they can interpret camera images directly. Text-only models require pre-processing of image data (e.g., image-to-text description) which loses information and adds latency. For local deployment, LLaVA or similar vision-language models work via Ollama. The bridge service supports any OpenAI-compatible API, so you can experiment with different models. Latency is the key trade-off: cloud APIs offer better quality but add 1-3 seconds of network latency; local models reduce latency but require a capable GPU.
3. How much latency does the sense-think-act loop add?
The measurement data from 660 experiments shows typical end-to-end latency: sensor reading (10-50ms) + data encoding/transmission (50-200ms) + LLM API call (1-3s for cloud, 200-500ms for local) + response parsing/output (50-100ms). Total: approximately 1.5-3.5s for cloud APIs, 300-800ms for local models. This is too slow for real-time control (like drone flight) but sufficient for interactive embodiment experiments (pet-like interactions, environmental monitoring, educational demonstrations). Aomway’s research team is exploring edge-optimized models to bring this latency under 200ms for industrial applications.
4. Can I use this project with a Raspberry Pi instead of ESP32?
Yes, with modifications. Raspberry Pi has more processing power and can run the bridge service locally, eliminating network latency. It can also connect directly to cameras and microphones via USB. However, the project is specifically designed for ESP32’s ultra-low-cost, real-time I/O capabilities. ESP32 excels at deterministic sensor reading and output driving (microsecond-level timing), while Raspberry Pi is better for compute-heavy tasks. For a hybrid approach, use ESP32 for real-time I/O and Raspberry Pi as the bridge service — this gives you the best of both worlds. Aomway uses similar architectures in our industrial IoT sensor nodes.
5. How can I extend this project for practical applications?
Practical extensions include: (1) Environmental monitoring — add temperature, humidity, gas sensors; the LLM can analyze trends and alert on anomalies. (2) Smart home integration — connect to Home Assistant or MQTT broker; the LLM can respond to voice commands and sensor events. (3) Educational robot — add motors and wheels; the LLM can navigate based on sensor input. (4) Industrial IoT — connect to industrial sensors (vibration, pressure, flow rate); the LLM can provide predictive maintenance insights. Always consider latency, reliability, and safety when moving from experiments to production. Aomway provides consulting for industrial embodied AI deployments — contact us to discuss your use case.
Exploring embodied AI or LLM-connected hardware? Contact Aomway at [email protected] — we provide ESP32 integration, LLM API consulting, and complete embodied AI system design for industrial and research applications.
