Stable hovering during aerial photography, autonomous return-to-home without GPS, silky-smooth gimbal footage… Behind every stable drone flight is a core sensor — the IMU (Inertial Measurement Unit). Acting as the drone’s inner ear, it perceives aircraft attitude in real time, making it the most critical sensing component in any flight control system.
1. What Does an IMU Contain? A Three-Axis Sensor Assembly
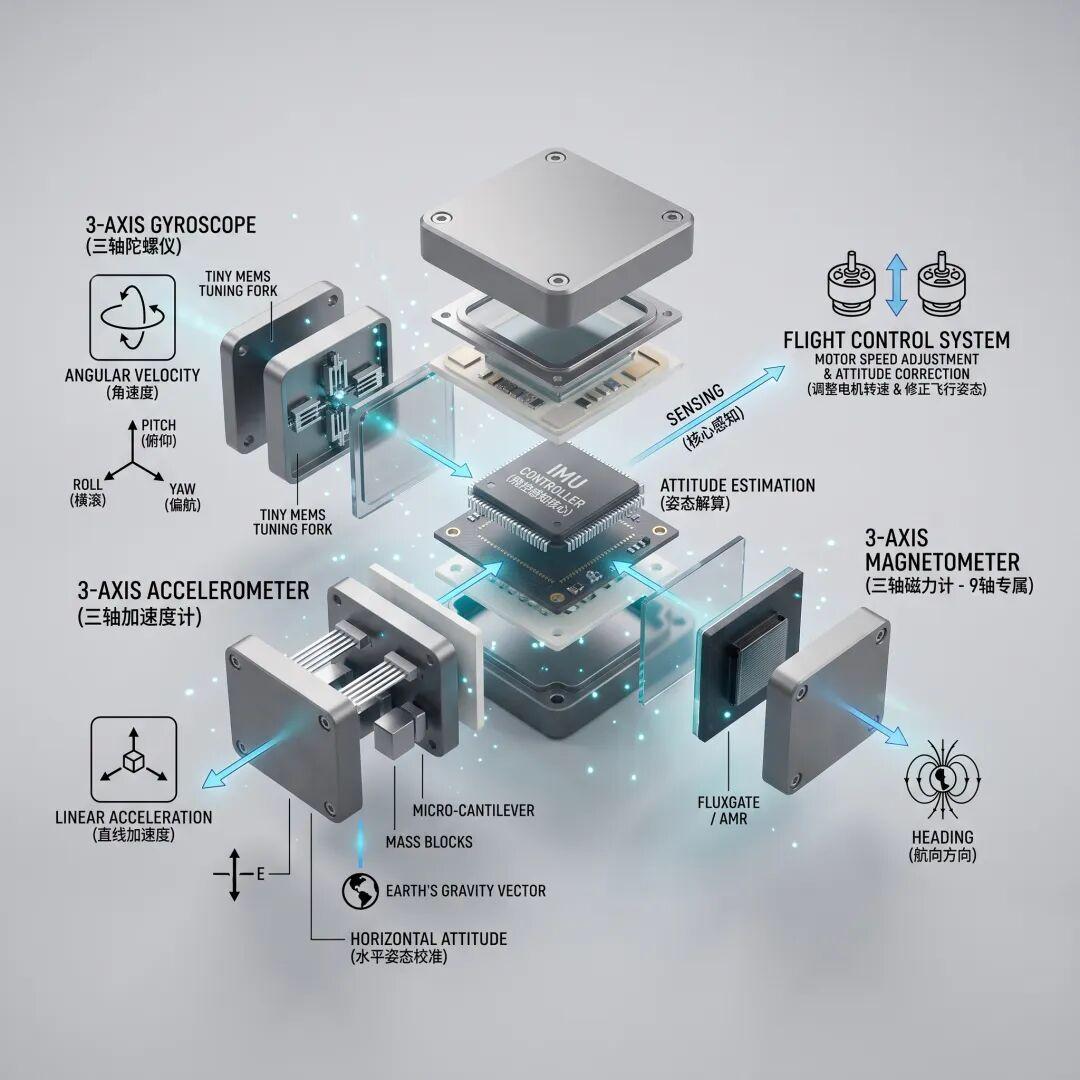
An IMU integrates high-precision MEMS (Micro-Electro-Mechanical Systems) sensors, available in two versions: 6-axis (entry-level) and 9-axis (professional).
Three-Axis Gyroscope
Using miniature tuning fork structures, it captures angular velocity across roll, pitch, and yaw axes in real time, detecting how fast the aircraft rotates and sensing every twist of the airframe.
Three-Axis Accelerometer
Using microcantilevers and proof masses, it measures three-dimensional linear acceleration. By leveraging Earth’s gravity vector, it completes horizontal attitude calibration and determines the aircraft’s tilt angle.
Three-Axis Magnetometer
Using fluxgate elements to sense the geomagnetic field, it locks heading direction, providing an accurate heading reference for the drone and compensating for long-term gyroscope drift.
The gyroscope captures rotation, the accelerometer calibrates level, and the magnetometer locks heading — working together, they deliver real-time attitude data to the flight controller.
2. How Does an IMU Work? Sense → Compute → Compensate Loop
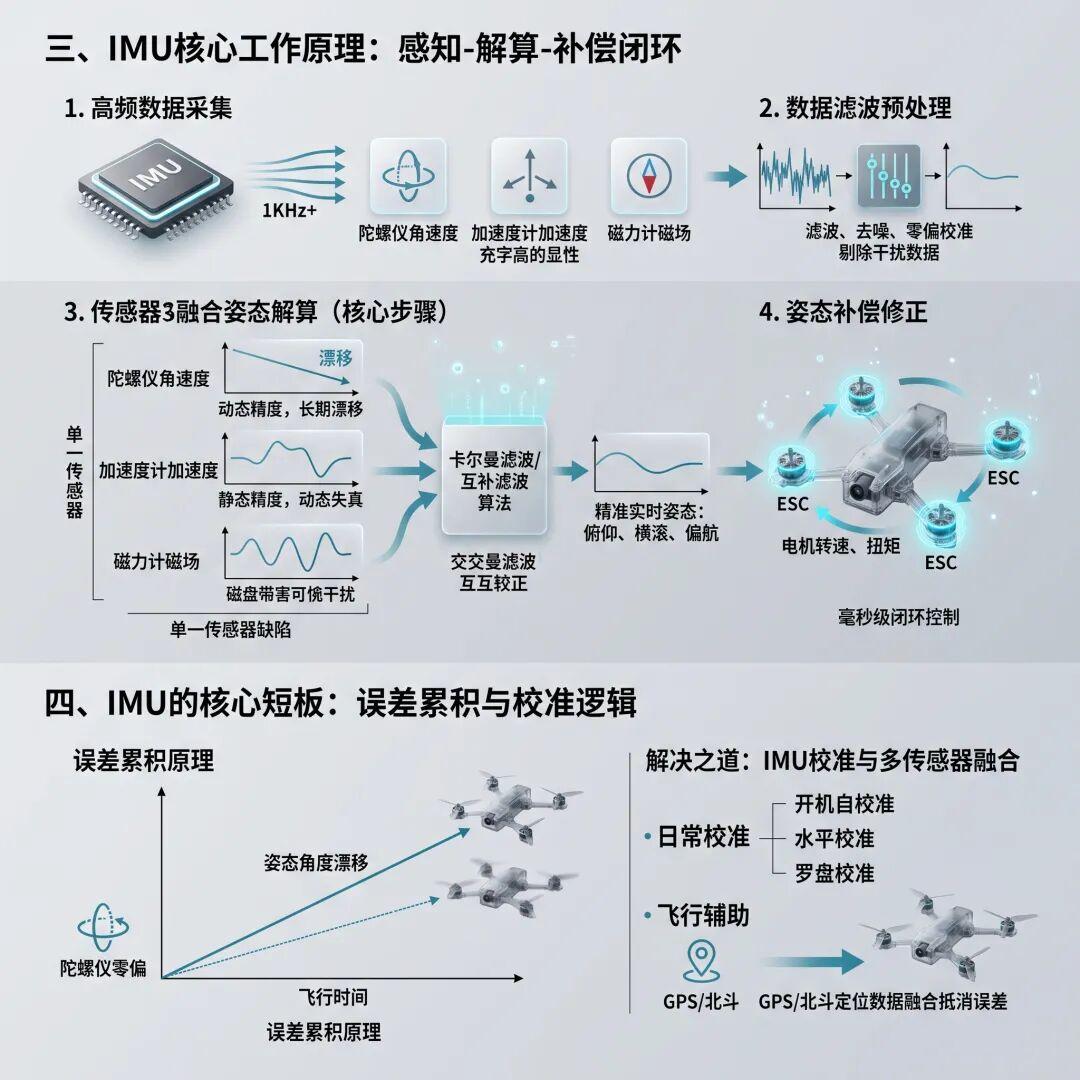
The IMU operates as a millisecond-level closed-loop control system across four steps:
Step 1: High-Frequency Raw Data Acquisition
At sampling rates exceeding 1kHz, the IMU continuously captures gyroscope angular velocity, accelerometer linear acceleration, and magnetometer magnetic field data — detecting even the subtlest airframe vibration.
Step 2: Filtered Pre-Processing
Raw signals undergo noise reduction and bias calibration, removing electromagnetic interference and mechanical vibration artifacts to ensure clean, reliable raw data.
Step 3: Multi-Sensor Fusion Computation
Every single sensor has limitations: gyroscopes have high short-term accuracy but drift over time when integrated; accelerometers are accurate for static attitude but distort during dynamic flight; magnetometers are highly susceptible to external magnetic interference.
The system uses Kalman filtering or complementary filtering algorithms to cross-validate the three data sets, mutually correct errors, and compute accurate pitch, roll, and yaw attitude in real time.
Step 4: Attitude Closed-Loop Compensation
Once attitude deviation is computed, the flight controller immediately adjusts ESC and motor speed to correct airframe tilt in real time, completing millisecond-level closed-loop control that firmly stabilizes flight attitude.
3. IMU’s Inherent Weakness: Error Drift & Solutions
The IMU’s biggest inherent flaw is gyroscope bias accumulation over flight time, causing attitude angle to drift slowly — the aircraft gradually veers off course.
Two complementary solutions suppress drift:
Regular Hardware Calibration
Before each flight, complete power-on self-calibration, level calibration, and compass calibration to eliminate sensor zero-bias errors.
Multi-Source Data Fusion Correction
Integrate IMU inertial navigation data with GPS / BeiDou positioning. Satellite positioning compensates for long-duration attitude drift during extended flights, ensuring stable long-distance navigation. Aomway’s industrial drone platforms combine dual-band RTK GPS with IMU fusion for centimeter-level positioning accuracy.
4. Four Core IMU Application Scenarios in Drones
1. Basic Stable Flight
Relying on real-time attitude sensing, the drone achieves smooth hovering and gentle flight — the most fundamental requirement for aerial photography and FPV racing. Without an IMU, no drone could stable take off.
2. GPS-Denied Emergency Return-to-Home
When GPS signals are lost in forests, canyons, or urban environments, satellite navigation fails. IMU inertial navigation independently estimates flight trajectory to autonomously guide the drone home, significantly reducing crash risk. This is a critical safety feature for Aomway’s inspection and search-and-rescue drone platforms.
3. Gimbal Aerial Photography Stabilization
Gimbals carry independent IMUs that sense airframe vibration in real time, applying counter-forces to cancel body movement. The result is smooth, stable aerial footage. The IMU inside the gimbal must have extremely low noise density to detect subtle high-frequency vibrations from motor and propeller activity.
4. High-Precision Industrial Operations
Surveying, agricultural inspection, and precision inspection drones rely on high-accuracy IMUs to achieve centimeter-level position holding. This ensures straight survey flight paths and accurate operation waypoints for industrial applications.
5. Key IMU Selection & Maintenance Tips
5.1 Choose Axis Count Based on Needs
6-axis: Consumer entry-level aerial photography drones and FPV racers. Sufficient for basic stable flight, excellent cost-performance ratio.
9-axis: Professional aerial photography, surveying, and long-range flight platforms. More stable heading, suitable for extended-range operations.
5.2 Focus on Core Specifications
Prioritize three parameters: bias stability, sampling rate, and measurement range. Lower bias means less drift; higher sampling rate delivers faster attitude response and more responsive flight control.
5.3 Daily Maintenance Guidelines
- Keep away from strong magnets, high-voltage power lines, and other strong magnetic field sources
- If hovering drift or unexplained drift occurs, immediately redo level calibration and compass calibration to prevent error accumulation
- Inspect IMU mounting for looseness after hard landings — mechanical stress can shift calibration
- For industrial applications, log IMU temperature and bias data over time to predict maintenance needs

The IMU is the attitude cornerstone of every drone: it senses every airframe movement through three-axis sensors, fuses data through filtering algorithms, and stabilizes flight through closed-loop control. From entry-level aerial photography drones to industrial precision platforms, IMU accuracy directly determines flight stability. Proper selection and regular calibration keep drift at minimum — making every flight平稳可控.
Have questions about IMU selection, sensor fusion algorithms, or flight controller integration? Contact Aomway at [email protected] — our engineering team provides IMU qualification, fusion algorithm consulting, and complete flight controller development services for industrial UAV applications.
Frequently Asked Questions
1. What is the difference between a 6-axis and 9-axis IMU, and which should I choose for my drone?
A 6-axis IMU contains a 3-axis gyroscope and 3-axis accelerometer. A 9-axis IMU adds a 3-axis magnetometer. The magnetometer provides absolute heading reference by sensing Earth’s magnetic field, which prevents gyroscope heading drift over long flights. For consumer aerial photography and FPV racing, 6-axis is sufficient. For surveying, precision inspection, and long-range operations where heading accuracy matters, 9-axis is recommended. Aomway equips all industrial-grade platforms with 9-axis IMUs for reliable heading maintenance.
2. What is sensor fusion, and why does my drone need it?
No single sensor is perfect: gyroscopes drift over time when angular velocity is integrated; accelerometers get distorted during dynamic flight; magnetometers are distorted by nearby metal and electromagnetic interference. Sensor fusion algorithms (Kalman filter, complementary filter) combine all sensor data, using each sensor’s strengths to compensate for others’ weaknesses. The result is stable, accurate attitude estimation across all flight conditions. Without fusion, drones would drift, oscillate, or lose control during maneuvers.
3. How does IMU calibration work, and do I need to calibrate before every flight?
Typical pre-flight calibration includes: power-on self-test (verifies sensor function), level calibration (establishes the “level” reference by averaging accelerometer readings), and compass calibration (maps the local magnetic field for magnetometer heading accuracy). You don’t need to calibrate before every flight — only after moving to a significantly different location, after a hard crash, after exposure to strong magnetic fields, or when you notice abnormal drift. Aomway’s flight controllers store calibration data persistently and only prompt for recalibration when sensor readings deviate from stored references.
4. Why do industrial drones need higher-specification IMUs than consumer drones?
Consumer drones fly for entertainment in relatively controlled environments. Industrial drones perform precision tasks — surveying, inspection, agricultural spraying — where IMU errors directly translate to positioning errors, missed waypoints, or unsafe flight. An industrial IMU with 1°/hr bias stability vs. a consumer IMU at 25°/hr means the industrial drone holds position accurately over a 30-minute flight while the consumer drone drifts meters off course. For Aomway’s surveying and inspection platforms, we use tactical-grade IMUs to meet sub-centimeter positioning requirements.
5. How does IMU contribute to GPS-denied navigation and return-to-home?
When GPS is unavailable, the flight controller uses IMU dead reckoning — integrating gyroscope and accelerometer data to estimate position and heading relative to the last known GPS fix. This is inherently imperfect (drift accumulates), so GPS-denied navigation has limited range before position error becomes unacceptable. However, dead reckoning is sufficient for short indoor flights, tunnel passages, or bridging brief GPS outages. Advanced systems combine visual odometry or LiDAR with IMU for extended GPS-denied navigation. Aomway’s autonomous inspection drones use IMU + computer vision fusion for reliable GPS-denied flight in complex environments.
Building or upgrading a drone platform? Contact Aomway at [email protected] — we provide IMU selection consulting, sensor fusion implementation, and turnkey flight controller development for industrial UAV applications.
