Why IMU Selection Is the Most Critical Decision in Drone Flight Controller Design
Selecting an inertial measurement unit (IMU) for a drone flight controller involves balancing precision, environmental adaptability, size, power consumption, and cost. As the “sensory core” of the flight control system, IMU performance directly determines flight stability and reliability.
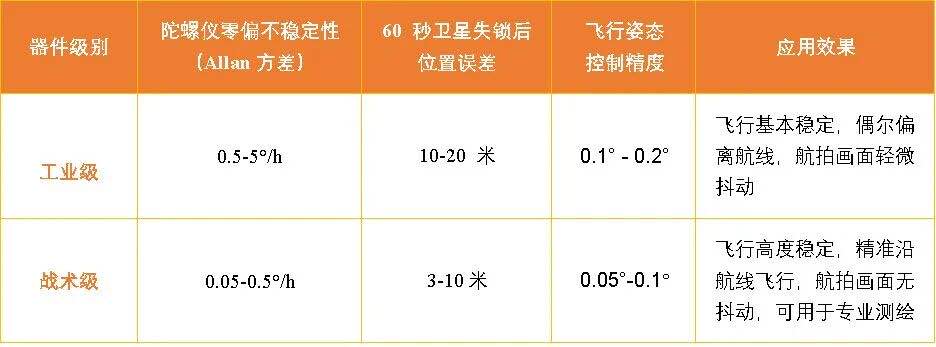
While consumer-grade drones prioritize affordability and portability, industrial UAVs demand higher precision, stronger environmental resilience, and system-level reliability. In terms of accuracy, industrial-grade drones typically require gyroscope bias stability in the 1°/h–10°/h range and accelerometer bias stability in the 0.1mg–1mg range. More importantly, these drones often operate in harsh environments with extreme temperature swings, continuous vibration, and electromagnetic interference — demanding IMU modules with wide operating temperature ranges (typically -40°C to +85°C), excellent temperature compensation, and vibration resistance to ensure stable data output under all conditions. Redundancy is another critical consideration: for mission-critical operations like surveying and inspection, flight controllers with dual or triple redundant IMU designs dramatically improve system fault tolerance and overall reliability. At Aomway, we’ve seen firsthand how the right IMU choice separates professional-grade FPV systems from the rest.
Core IMU Parameters Every Drone Engineer Should Know
1. Degrees of Freedom (DoF)
A 6-DoF IMU integrates a 3-axis gyroscope and 3-axis accelerometer, meeting the fundamental needs of drone flight control. A 9-DoF IMU adds a magnetometer, enabling yaw drift correction via geomagnetic reference. Some solutions also integrate a barometer for a 10-DoF system, achieving more precise altitude hold — a feature we value at Aomway for long-range FPV applications.
2. Key Gyroscope Parameters
Full-scale range determines the maximum measurable angular velocity. Racing and acrobatic drones require a wide range of ±2000°/s. Bias instability is the critical metric for long-term heading maintenance — lower is always better, with industrial-grade typically below 10°/h. Angle random walk (ARW) determines the smoothness of attitude output and is essential for precision hovering and cinematography work.
3. Key Accelerometer Parameters
Range between ±8g and ±16g satisfies most requirements. Bias stability, measured in mg, directly correlates with measurement precision. Noise density affects raw data purity, which is especially important when IMU data feeds into advanced Kalman filters like those used in Aomway flight controllers.
Beyond measurement accuracy, shock resistance is equally critical for gyroscope quality. Electronic devices inevitably encounter bumps and impacts during operation — a shock-resistant gyroscope maintains accurate data output and ensures attitude stability throughout the mission.
The market offers several excellent industrial-grade IMU products. ADI’s ADIS16470 stands out with its ultra-compact BGA package and accelerometer range up to ±40g, combining wide dynamic range with low power consumption — ideal for compact industrial drones. For vibration rejection, Bosch’s BMI088 integrates a 16-bit 3-axis accelerometer and gyroscope specifically designed to handle continuous vibration from motors and propellers, effectively suppressing vibration interference for stable attitude data during dynamic flight.
However, these sensors face real-world challenges: insufficient drift performance in demanding scenarios, high unit costs, or supply shortages with long lead times. Is there a better alternative? The answer is the EM503 module — a miniaturized, high-stability IMU developed through strategic partnership, offering an excellent price-performance balance for industrial drone flight controllers.
EM503 Miniature IMU Module: Deep Dive
The EM503 is a compact inertial measurement unit that delivers professional-grade performance in a tiny footprint. It integrates a 3-axis gyroscope and 3-axis accelerometer with the gyroscope chip achieving an internal data latency of just 0.5ms and bandwidth up to 500Hz, eliminating data delay at the source. The noise performance is exceptional with ARW of only 0.08°/√h.
The gyroscope uses quartz crystal as its base material, providing inherently low temperature sensitivity. Each EM503 module undergoes full-temperature compensation calibration for superior temperature stability. Furthermore, Epson’s quartz material structure naturally enables high-sensitivity output with simple circuitry — no feedback loop required — resulting in inherently low-latency characteristics that Aomway engineers particularly appreciate for high-speed FPV applications.
The module supports SPI and UART communication interfaces with data output rates up to 2000sps, meeting the real-time requirements of drone flight controllers, gimbals, and electro-optical pods. Its combination of high stability, precision, and compact size makes it suitable for navigation, stabilized systems, surveying and mapping, drones (flight controllers, gimbals, EO/IR pods), robotics, VR/AR, and IoT applications.

Key Specifications
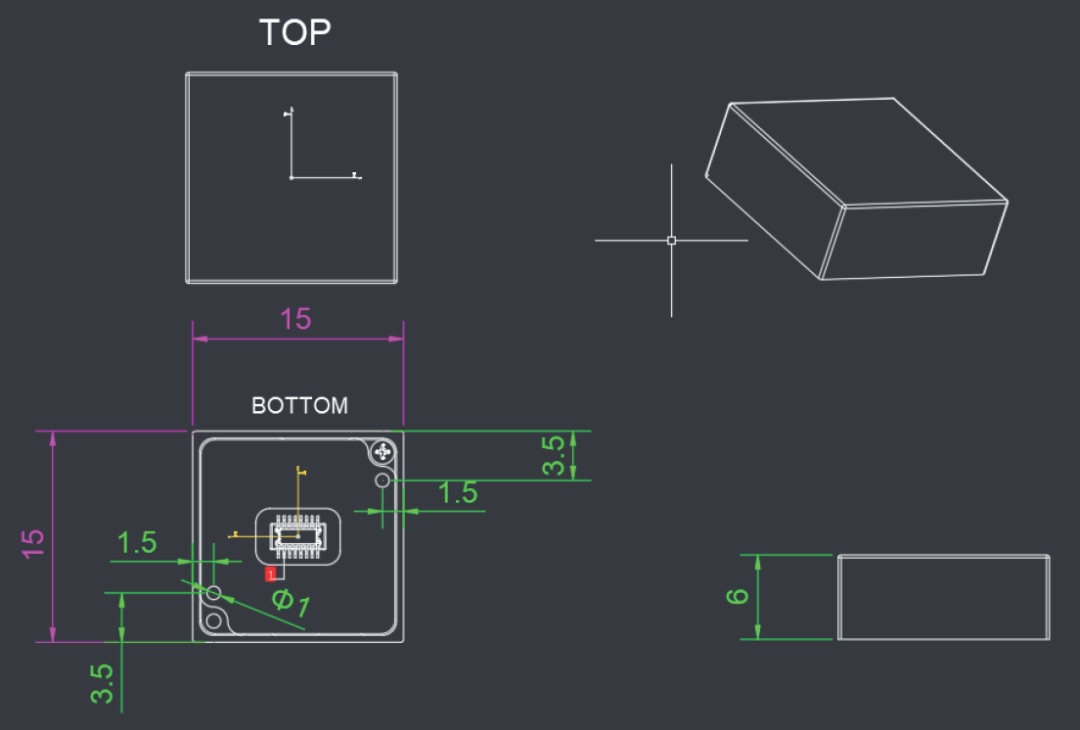
- Ultra-compact size: 15 × 15 × 6mm
- Low noise, high stability: Gyro bias instability 3.5°/h, ARW 0.08°/√h, axis cross-axis sensitivity ±0.01°, attitude accuracy ±0.2°
- Initial bias: 360°/h (1σ) gyro / 3mg (1σ) accelerometer
- 6 Degrees of Freedom: Triple gyroscopes ±400°/s, tri-axis accelerometer ±16g
- 32-bit data resolution
- Output interfaces: USART / SPI with source code for data parsing
- Calibrated stability: Bias, scale factor, axial alignment
- Max data output rate: 2000sps
- Data outputs: Angular velocity, acceleration, attitude angles, quaternion, temperature
- Calibrated operating temperature: -20°C to +85°C
- Supply voltage: 3.3±0.15V
- Low power consumption: 20mA (typical)
Key Takeaways
- IMU selection is the most critical decision in drone flight controller design — it directly impacts flight stability, reliability, and mission capability
- For industrial UAVs, prioritize bias instability (<10°/h), wide temperature range (-40°C to +85°C), and vibration resistance over cost
- The EM503 module offers professional-grade IMU performance (3.5°/h bias instability, 0.08°/√h ARW) in a compact 15×15×6mm form factor at a competitive price point
- Quartz crystal gyroscope technology provides inherently low temperature drift and ultra-low latency (0.5ms) compared to MEMS alternatives
- When building a reliable drone system, redundant IMU design should be considered for mission-critical applications — this is a lesson Aomway has applied across its product line
FAQ
What is the most important IMU parameter for drone flight controllers?
Bias instability (measured in °/h for gyroscopes) is the most critical parameter, as it determines how well the IMU maintains accurate heading over time without external correction. For industrial-grade drones, aim for below 10°/h; the EM503 achieves 3.5°/h.
How does quartz crystal gyroscope technology compare to MEMS?
Quartz crystal gyroscopes offer inherently lower temperature sensitivity, simpler circuitry (no feedback loop needed), and ultra-low latency (~0.5ms). MEMS gyroscopes are cheaper and smaller but typically have higher drift and noise. The EM503 leverages quartz crystal advantages in a compact module.
What size IMU is suitable for small industrial drones?
The EM503’s 15×15×6mm footprint makes it suitable for drones as small as 250mm wheelbase while delivering industrial-grade performance. This is significantly smaller than traditional industrial IMU modules while matching or exceeding their specifications.
Why do industrial drones need redundant IMUs?
Redundant IMU designs provide fault tolerance — if one sensor fails or produces anomalous data mid-flight, the flight controller can cross-reference and switch to the backup. This is essential for BVLOS operations, autonomous missions, and any application where a single sensor failure could mean a total loss.
Does the EM503 support standard drone flight controller interfaces?
Yes, the EM503 supports both SPI and UART communication at up to 2000sps, compatible with all major open-source flight controller stacks including PX4, ArduPilot, and Betaflight. Source code for data parsing is provided, simplifying integration.
